
1.Sistemas de control adaptativo.
1.1 Historia
1.2 Que es?
1.3 Razón de ser
1.4 Estimación de parámetros.
1,5 Clasificación
1.6 La estabilidad de Lyapunov
1.7 Aplicaciones de control adaptativo.
1.8 Vídeo explicativo de control de velocidad adaptativo
2. Sistemas de control con rango partido.2.1 Ejemplo
2.2 Funcionamiento
2.3 Vídeo explicativo
1. Sistema de control adaptativo
1.1 Historia: El control adaptativo nació en 1950, al diseñar el control automático de un avión donde la dinámica era variable en el rango de operación deseado. Por este motivo, el control convencional no era capaz de abarcar el rango de operación y se llega a una técnica de esquema de ganancias por rangos (Gain scheduling).
Desde entonces el control adaptativo ha ido se ha extendido a más aplicaciones como en hornos de secado, control activo de vibraciones, climatización eficiente, robótica… Permitiendo controlar el proceso o incluso mejorar la eficiencia que se tenía con un control convencional.
1.2 Que es?: es el método de control utilizado por un controlador que debe adaptarse a un sistema controlado con parámetros que varían o son inicialmente inciertos. Por ejemplo, cuando un avión vuela, su masa disminuirá lentamente como resultado del consumo de combustible; Se necesita una ley de control que se adapte a tales condiciones cambiantes. El control adaptativo es diferente del control robusto en que no necesita información a priori sobre los límites de estos parámetros inciertos o variables en el tiempo; El control robusto garantiza que si los cambios se encuentran dentro de los límites establecidos, la ley de control no necesita ser cambiada, mientras que el control adaptativo se ocupa de que la ley de control cambie a sí misma.
Específicamente el control adaptativo es un conjunto de técnicas que permiten ajustar en tiempo real el valor de los parámetros de control, permitiendo un buen seguimiento de las variables controladas aunque se desconozca los parámetros de la planta o cambien en el tiempo. Este control es un tipo especial de control no lineal, y el proceso puede ser separado en dos escalas de tiempo: tiempo rápido (bucle de la realimentación) y tiempo lento (variación de los parámetros de control, el cual afecta a los automatismos).

1.3 Razón de ser: Los controladores convencionales están pensados para ajustar sistemas lineales e invariantes en el tiempo (LTI). Esta aproximación es cierta para puntos fijos de operación con pequeñas perturbaciones. Cuando esta aproximación deja de ser cierta, el comportamiento de los controladores convencionales deja de ser bueno. El control adaptativo, por otro lado, sí es capaz de adaptarse cambiando sus parámetros de control, manteniendo un buen control del proceso.
1.4 Estimación de parámetros: La base del control adaptativo es la estimacion de parametros , que es una rama de la identificacion del sistema. Los métodos comunes de estimación incluyen mnimos cuadrados recursivos y descenso de gradiente. Ambos métodos proporcionan leyes de actualización que se utilizan para modificar estimaciones en tiempo real (es decir, a medida que el sistema funciona). La estabilidad de Lyapunov se utiliza para derivar estas leyes de actualización y mostrar criterios de convergencia (por lo general, excitación persistente; la relajación de esta condición se estudia en el control adaptativo del aprendizaje concurrente). La proyección matemática y la normalización se usan comúnmente para mejorar la solidez de los algoritmos de estimación.
1.5 Clasificación
En general, se debe distinguir entre:
- Control adaptativo de avance
- Control adaptativo de retroalimentación
así como entre
- Métodos directos
- Métodos indirectos
- Métodos híbridos
Los métodos directos son aquellos en los que los parámetros estimados son aquellos utilizados directamente en el controlador adaptativo. En contraste, los métodos indirectos son aquellos en los que los parámetros estimados se usan para calcular los parámetros requeridos del controlador. Los métodos híbridos se basan tanto en la estimación de parámetros como en la modificación directa de la ley de control.


Existen varias categorías amplias de control adaptativo de retroalimentación (la clasificación puede variar):
- Controladores adaptativos duales: basados en la teoria del control dual
- Controladores duales óptimos: difíciles de diseñar
- Controladores duales subóptimos
- Controladores adaptativos no duales
- Colocación adaptativa del poste
- Controladores que buscan extremidades
- Control de aprendizaje iterativo.
- Programación de ganancia
- Controladores adaptativos de referencia modelo (MRAC): incorpore un modelo de referencia que defina el rendimiento deseado de circuito cerrado
- MRAC de optimización de gradiente: utilice la regla local para ajustar los parámetros cuando el rendimiento difiere de la referencia. Ej .: "regla MIT".
- Estabilidad optimizada MRAC
- Controladores adaptativos de identificación del modelo (MIAC): realizan la identificacion del sistema mientras el sistema está en funcionamiento
- Controladores adaptativos cautelosos: use el SI actual para modificar la ley de control, lo que permite la incertidumbre del SI
- Controladores adaptativos equivalentes a la certeza: tome el SI actual como el verdadero sistema, no asuma incertidumbre
- Controladores adaptativos no paramétricos
- Controladores adaptativos paramétricos
- Controladores adaptativos de parámetros explícitos
- Controladores adaptativos de parámetros implícitos
- Múltiples modelos : utilice una gran cantidad de modelos, que se distribuyen en la región de incertidumbre y se basan en las respuestas de la planta y los modelos. Se elige un modelo en cada instante, que está más cerca de la planta de acuerdo con alguna métrica.

También se pueden introducir algunos temas especiales en control adaptativo:
- Control adaptativo basado en la identificación de procesos de tiempo discreto.
- Control adaptativo basado en la técnica de control de referencia del modelo
- Control adaptativo basado en modelos de proceso de tiempo continuo.
- Control adaptativo de procesos multivariables
- Control adaptativo de procesos no lineales.
- Control adaptativo de aprendizaje concurrente, que relaja la condición de excitación persistente para la convergencia de parámetros para una clase de sistemas.
El control adaptativo incluso se ha fusionado con técnicas inteligentes, como las redes difusas y neuronales, y se han generado los nuevos términos como control adaptativo difuso.
1.6 La estabilidad de Lyapunov

1.7 Aplicaciones del control adaptativo: se necesita una consideración especial de los problemas de convergencia y rubustez . La estabilidad de Lyapunov se usa típicamente para derivar leyes de control de adaptación y mostrar.
- Autoajuste de controladores lineales fijos posteriores durante la fase de implementación para un punto operativo;
- Autoajuste de controladores robustos fijos posteriormente durante la fase de implementación para toda la gama de puntos operativos;
- Autoajuste de controladores fijos a pedido si el comportamiento del proceso cambia debido al envejecimiento, la deriva, el desgaste, etc.
- Control adaptativo de controladores lineales para procesos no lineales o que varían en el tiempo;
- Control adaptativo o control de autoajuste de controladores no lineales para procesos no lineales;
- Control adaptativo o control de autoajuste de controladores multivariables para procesos multivariables (sistemas MIMO);
Por lo general, estos métodos adaptan los controladores a las estadísticas y dinámicas del proceso. En casos especiales, la adaptación puede limitarse solo al comportamiento estático, lo que lleva a un control adaptativo basado en curvas características para los estados estables o al control de valores extremos, optimizando el estado estacionario. Por lo tanto, hay varias formas de aplicar algoritmos de control adaptativo.
Una aplicación particularmente exitosa del control adaptativo ha sido el control de vuelo adaptativo. Este cuerpo de trabajo se ha centrado en garantizar la estabilidad de un modelo de esquema de control adaptativo de referencia utilizando argumentos de Lyapunov. Se han llevado a cabo varias demostraciones exitosas de pruebas de vuelo, incluido el control adaptativo tolerante a fallas.
1.8 Vídeo explicativo de control de velocidad adaptativo:
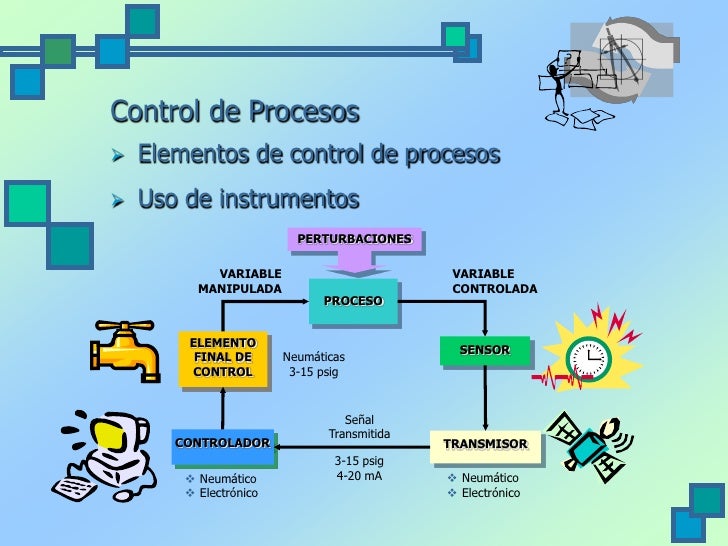
2. Control en Rango Dividido o Partido
Es un sistema de control en el cual existe una sola variable
controlada y dos o más variables manipuladas, que deben tener el mismo efecto
sobre la variable controlada. Para realizar éste sistema se requiere compartir
la señal de salida del controlador con los varios elementos finales de control.
CONTROL DE RANGO DIVIDIDO (SPLIT - RANGE CONTROL).
Es un sistema de control en el cual existe una sola
variable controlada y dos o más variables manipuladas que deben tener el mismo
efecto sobre la variable controlada.
Para realizar este sistema se requiere compartir la señal de
salida del controlador con varios elementos finales de control. Ejemplo:
Control de temperatura de un baño electrolítico En estos baños el calor
producido por el paso de la corriente eléctrica, es removido por un flujo
controlado de agua de enfriamiento.
Cuando se requiere recubrir piezas de gran
tamaño la temperatura del baño desciende, por lo que se emplean serpentines que
transportan flujos regulados de vapor para llevarlo hasta su punto de referencia.
Cuando la solución electrolítica está en el punto de referencia, los flujos de
agua y de vapor deben ser nulos. Las acciones anteriores deben realizarse con
un controlador de rango partido, cuya salida va a los posicionadores de las
válvulas de agua y de vapor.

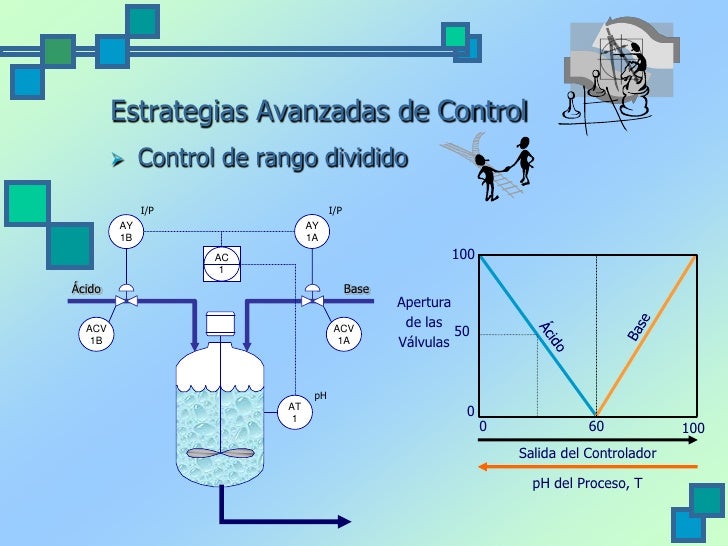
2.1 Ejemplo: Reactor al que entra un producto gaseoso A, y sale un producto B resultante de la reacción. Objetivo: Mantener la presión P del interior del reactor Variables manipuladas: válvula de entrada de A y válvula de salida de B La salida del regulador de presión PC va a un selector que se encarga de distribuir la acción de control entre las dos válvulas V1 y V2 La política a seguir está representada en la gráfica 2: . A presiones bajas, V1 estará abierta al 100% y V2 cerrada. . A altas presiones, V1 estará cerrada y V2 abierta. A presiones intermedias, la abertura de cada válvula se determina de la gráfica.

2.2 Funcionamiento
2.3 Vídeo explicativo